








Eddie Gonzales Jr. – MessageToEagle.com – Researchers at the University of Washington have developed small robotic devices that can change how they move through the air by “snapping” into a folded position during their descent.
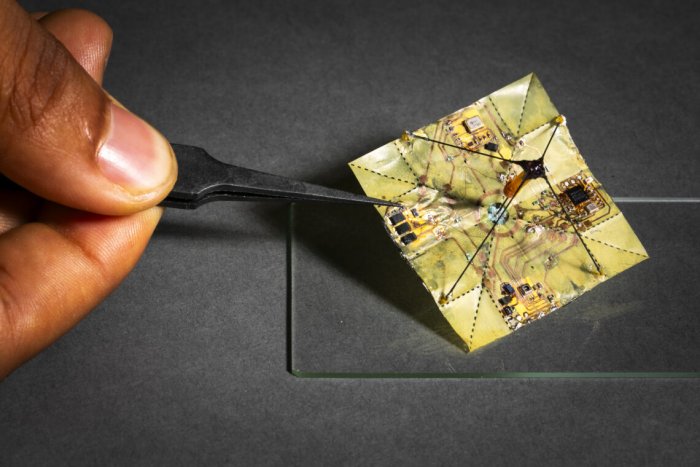
UW researchers developed small robotic devices that can change how they move through the air by “snapping” into a folded position during their descent. Each device has an onboard battery-free actuator, a solar power-harvesting circuit and controller to trigger these shape changes in mid-air. Shown here is a “microflier” in the unfolded state.Mark Stone/University of Washington
When these “microfliers” are dropped from a drone, they use a Miura-ori origami fold to switch from tumbling and dispersing outward through the air to dropping straight to the ground. To spread out the fliers, the researchers control the timing of each device’s transition using a few methods: an onboard pressure sensor (estimating altitude), an onboard timer or a Bluetooth signal.
Microfliers weigh about 400 milligrams — about half as heavy as a nail — and can travel the distance of a football field when dropped from 40 meters (about 131 feet) in a light breeze. Each device has an onboard battery-free actuator, a solar power-harvesting circuit and controller to trigger these shape changes in mid-air. Microfliers also have the capacity to carry onboard sensors to survey temperature, humidity and other conditions while soaring.
“Using origami opens up a new design space for microfliers,” said co-senior author Vikram Iyer, UW assistant professor in the Paul G. Allen School of Computer Science & Engineering. “We combine the Miura-ori fold, which is inspired by geometric patterns found in leaves, with power harvesting and tiny actuators to allow our fliers to mimic the flight of different leaf types in mid-air. In its unfolded flat state, our origami structure tumbles chaotically in the wind, similar to an elm leaf. But switching to the folded state changes the airflow around it and enables a stable descent, similarly to how a maple leaf falls. This highly energy efficient method allows us to have battery-free control over microflier descent, which was not possible before.”
These robotic systems overcome several design challenges.
The devices:
- are stiff enough to avoid accidentally transitioning to the folded state before the signal.
- transition between states rapidly. The devices’ onboard actuators need only about 25 milliseconds to initiate the folding.
- change shape while untethered from a power source. The microfliers’ power-harvesting circuit uses sunlight to provide energy to the actuator.
The current microfliers can only transition in one direction — from the tumbling state to the falling state. This switch allows researchers to control the descent of multiple microfliers at the same time, so they disperse in different directions on their way down.
Future devices will be able to transition in both directions, the researchers said. This added functionality will allow for more precise landings in turbulent wind conditions.
Additional co-authors on this paper are Kyle Johnson and Vicente Arroyos, both UW doctoral students in the Allen School; Amélie Ferran, a UW doctoral student in the mechanical engineering department; Raul Villanueva, Dennis Yin and Tilboon Elberier, who completed this work as UW undergraduate students studying electrical and computer engineering; Alberto Aliseda, UW professor of mechanical engineering; Sawyer Fuller, UW assistant professor of mechanical engineering; and Shyam Gollakota, UW professor in the Allen School.
This research was funded by a Moore Foundation fellowship, the National Science Foundation, the National GEM Consortium, the Google fellowship program, the Cadence fellowship program, the Washington NASA Space Grant fellowship Program and the SPEEA ACE fellowship program.
Written by Eddie Gonzales Jr. – MessageToEagle.com Staff